
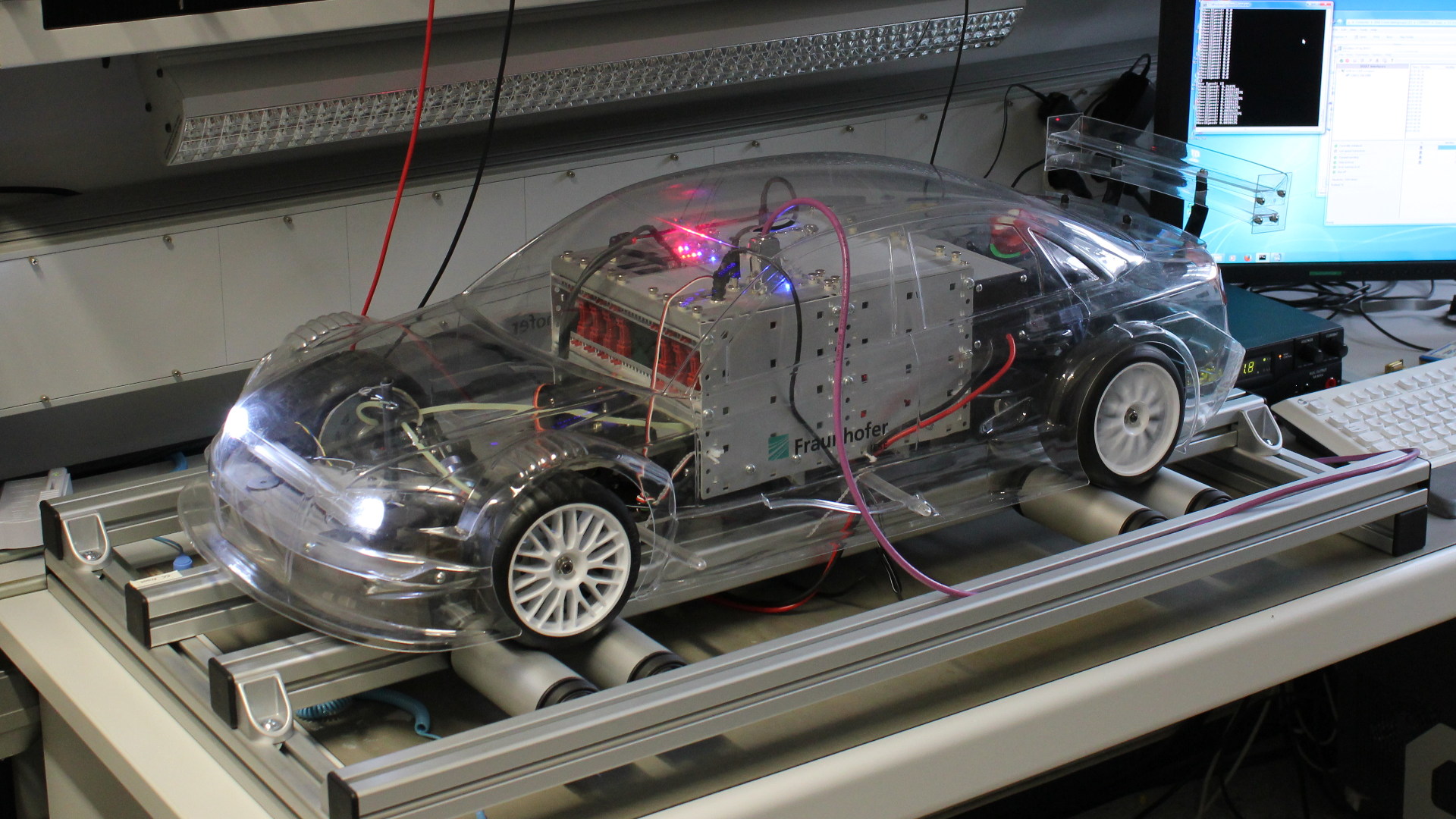
ConceptCar 2
The electro-mechanical base system of the ConceptCar 2 relies on a commercial remote-controlled model car and offers a rear wheel drive with brushless 3.5 kW electric motor, speed controller, and transmission, power steering, as well as servo-driven hydraulic disc brakes on the front wheels. The chassis provides a shock-mount for two 19 inch sub-racks carrying the electrical power supply and the electronic control units. Compared to ConceptCar 1, its ECU modules are made easily exchangeable and now carry a more powerful micro-controller (Cortex M3).
Energy Supply
For the supply of the drive motor and the servos, a LiPo battery (5 cells, 18.5 V, 4600 mAh) offers currents beyond 100 amperes, which are further distributed via current bars and fuses. A battery switch disconnects the driving battery from the system. The supply of the electronic control system is realized as a plugin module with a smaller LiPo battery (3 cells, 11.1 Volt, 1600 mAh), independent of the driving power source. Both batteries can be recharged without having to dismount them.
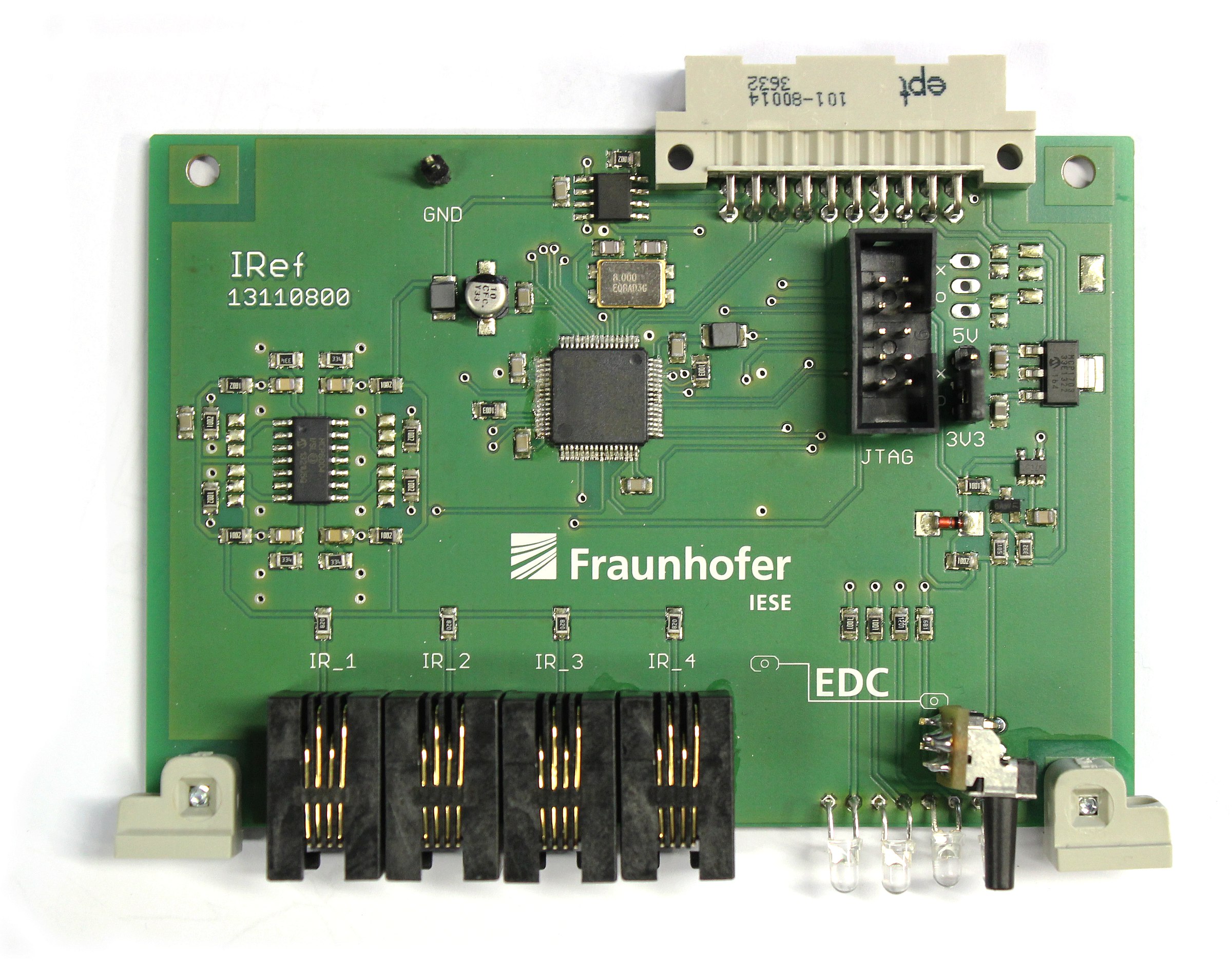
Electronic Control System
Each electronic control unit is realized as a modular 100x70 mm insertion card for the 19-inch standard and provides a 32-bit Cortex M3 microcontroller with JTAG programming interface, and a 20-pin jack to connect to a conjointly used bus board (backplane) distributing current supply and signals (CAN bus). The backplane for this system has been specifically designed for this purpose. The following modules are currently in use:



Software
There are two software flavors running as firmware on the ECUs: One provides an architecture, which is (to the extent possible) compliant with the the AUTOSAR standard's specifications of the basic software C-API. Even though no complete implementation could be developed, the resulting software environment is still close to reality. The second alternative is under development and tries to unify access to the different target platforms based on C++ as programming language. Some adaptations of the integrated development environment Eclipse allow to create application programs in C and C++, while directly supporting upload and testing of the new firmware on the target ECU (in-system debugging).